* Restart MAX17043 from the scratch * revert change * Changed battery capacity in charge (capacity is the Ah value of the battery, this degrades over time when battery ages) * merge * Changing xsns_109 to 110 * fix nr * removed old xsns109 * Update I2CDEVICES.md * clean-up usage of Interface |
||
|---|---|---|
| .. | ||
| examples/DFRobot_MAX17043 | ||
| python | ||
| resources/images | ||
| DFRobot_MAX17043.cpp | ||
| DFRobot_MAX17043.h | ||
| LICENSE | ||
| README_CN.md | ||
| keywords.txt | ||
| library.properties | ||
| readme.md | ||
readme.md
DFRobot_MAX17043
-
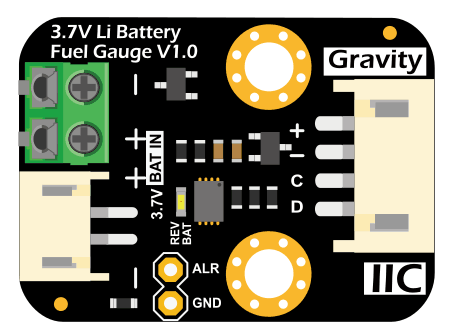
The MAX17043 is ultra-compact, low-cost,host-side fuel-gauge systems for lithium-ion (Li+) batter-ies in handheld and portable equipment.It employs Gravity I2C interface,ultra-low opearting current, and real-time tracking of the relative state of charge (SOC) of the battery through Maxim's patented algorithm,eliminating the need for full-to-empty relearning and offset accumualtion errors. Plug and play to accurately measure the voltage and remaining power of the battery. The module also features as a low battery power alert interrupt function. When the battery power falls below specified threshold, the ALR pin generates a falling pluse to trigger the external interrupt of the controller.One thing should mention that the default value of the battery low power interrupt alert threshold is 32%, this threshold can be set by the function setInterrupt().
Product Link(https://www.dfrobot.com/product-1734.html)
SKU: DFR0563
Table of Contents
Summary
Provides an Arduino library for reading and interperting MAX17043 data over I2C.
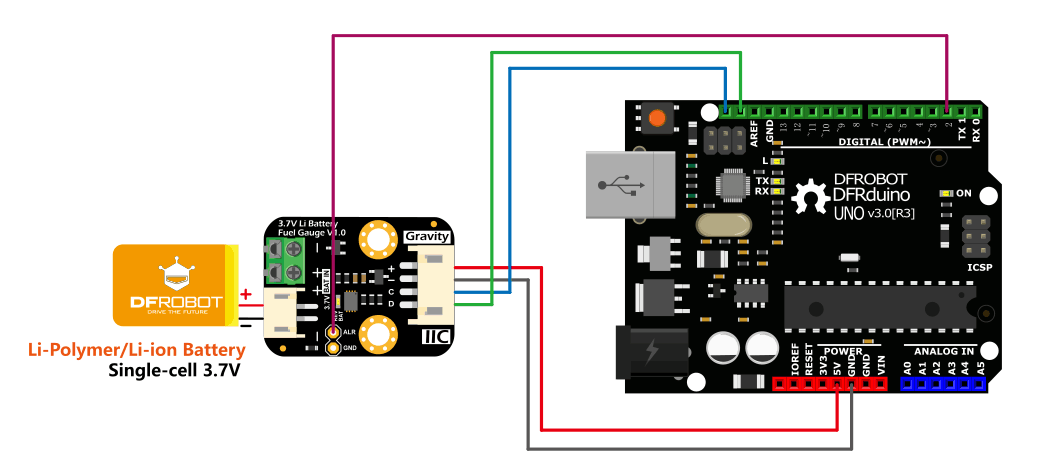
Connection
Wires of the same color are linked together,and We only exemplify how these the boards are connected to the Fuel Gauge. When connecting , it is necessary to pay attention to the correspondence among pins, the connection diagram is as fellows.
-
Arduino UNO
-
ESP32

Installation
To use this library download the zip file, uncomperss it to a folder named DFRobot_MAX17043 in Arduino library.
Methods
/**
* @fn DFRobot_MAX17043
* @brief create MAX17043 object
* @return MAX17043 object
*/
DFRobot_MAX17043();
/**
* @fn begin
* @brief MAX17043 begin and test moudle
*
* @return initialization result
* @retval 0 successful
* @retval -1 faild
*/
int begin();
/**
* @fn readVoltage
* @brief read battery voltage in mV
* @return voltage in mV
*/
float readVoltage();
/**
* @fn readPercentage
* @brief read battery remaining capacity in percentage
*
* @return battery remaining capacity in percentage
*/
float readPercentage();
/**
* @fn setInterrupt
* @brief set MAX17043 interrput threshold
*
* @param per interrupt threshold as %1 - 32% (integer)
*/
void setInterrupt(uint8_t per);
/**
* @fn clearInterrupt
* @brief clear MAX17043 interrupt
*/
void clearInterrupt();
/**
* @fn setSleep
* @brief set MAX17043 in sleep mode
*
*/
void setSleep();
/**
* @fn setWakeUp
* @brief wake up MAX17043
*
*/
void setWakeUp();
Compatibility
| MCU | Work Well | Work Wrong | Untested | Remarks |
|---|---|---|---|---|
| FireBeetle-ESP32 | √ | |||
| FireBeetle-ESP8266 | √ | |||
| Arduino uno | √ |
History
- 2018/04/14 - Version 1.0.0 released.
Credits
Written by ouki.wang(ouki.wang@dfrobot.com), 2018. (Welcome to our website)